RFID智能終端
設備研發與生(shēng)産
 2022-11-25
2022-11-25

RFID是一種通(tōng)信技(jì)能,經過無線電(diàn)信号辨認特定方針并讀寫相關物品數(shù)據,非接觸式進行(xíng)收集。RFID可(kě)以快速讀取、長期盯梢辦理(lǐ),因而在智能辨認領域受到高(gāo)度青睐,運用十分廣泛。RFID室內(nèi)定位體(tǐ)系是經過遠距離、非接觸式收集RFID電(diàn)子标簽的信息,然後完結人(rén)員在移動狀态下的主動信息辨認,使得(de)在室內(nèi)和(hé)其他特定區(qū)域的定位技(jì)能上(shàng),RFID定位技(jì)能現已具有(yǒu)很(hěn)大(dà)的優勢。
一.RFID室內(nèi)定位原理(lǐ):
基于RFID的室內(nèi)定位方法就是通(tōng)過已知位置的讀寫器(qì),對标簽進行(xíng)定位,可(kě)以分為(wèi)非測距方法和(hé)測距方法。基于測距的方法是指通(tōng)過各種測距技(jì)術(shù)對目标設備與各标簽之間(jiān)的實際距離進行(xíng)估計(jì),再通(tōng)過幾何方式來(lái)估計(jì)目标設備的位置。常用的基于測距的定位方法有(yǒu):基于信号到達時(shí)間(jiān)(Time of Arrival,TOA)定位、基于信号到達時(shí)間(jiān)差(Time Difference of Arrival,TDOA)定位、基于RSSI定位、基于信号到達角(Angle of Arrival,AOA)等。本次用的是AOA定位技(jì)術(shù):信角度法(Angle of Arrival,AOA)定位系統的工作(zuò)原理(lǐ)是利用具有(yǒu)方向性的天線或天線陣列來(lái)判斷主動式标簽信号可(kě)能的來(lái)源方向。這個(gè)方向在2D平面上(shàng)可(kě)決定出一條以RFID讀取器(qì)為(wèi)起點的直線,用兩個(gè)以上(shàng)的RFID讀取器(qì)測量出這個(gè)主動式标簽的方向,兩條以上(shàng)的直線的交點就是主動式标簽的可(kě)能位置。
二.RFID室內(nèi)定位技(jì)術(shù)的優勢:
基于RFID技(jì)術(shù)的定位方法的優點在于成本低(dī)廉,有(yǒu)源RFID标簽成本通(tōng)常在幾十元,而無源RFID标簽成本可(kě)以做(zuò)到幾元錢(qián),且标簽體(tǐ)積很(hěn)小(xiǎo),通(tōng)常制(zhì)作(zuò)成薄片的形狀,且RFID射頻信号穿透性較強,可(kě)進行(xíng)非視(shì)距通(tōng)信。RFID系統的通(tōng)信效率很(hěn)高(gāo),相比與Wi-Fi和(hé)Zigbee等需要網絡接入的系統,一個(gè)RFID讀寫器(qì),可(kě)以再1秒(miǎo)時(shí)間(jiān)內(nèi)完成上(shàng)百個(gè)标簽的讀寫。相比于ZigBee、藍(lán)牙和(hé)Wi-Fi無線定位技(jì)術(shù),RFID的節點成本更低(dī),定位速度更快,但(dàn)是其通(tōng)信能力較弱,因而RFID定位特别适用于需要簡單的标記對象,但(dàn)不需要進行(xíng)大(dà)量數(shù)據通(tōng)信的場(chǎng)合。
三.RFID室內(nèi)定位技(jì)術(shù)系統架構:
RFID定位體(tǐ)系主要由定位标簽、讀寫器(qì)(基站(zhàn))、和(hé)定位體(tǐ)系軟件組成。
1、RFID頂置式一體(tǐ)機。讀寫器(qì)內(nèi)部有(yǒu)一個(gè)完整的廣角陣列天線,能夠以前所未有(yǒu)的精度和(hé)速度控制(zhì)波束并估算(suàn)帶有(yǒu)RFID标簽的物品的方位。并且配有(yǒu)專有(yǒu)的定位軟件。讀寫器(qì)主要是擔任數(shù)據收集标簽位置的信号,并上(shàng)傳到定位服務器(qì),裝置在定位區(qū)域內(nèi)。
2、RFID定位标簽。定位标簽采用無源UHF 标簽,成本極低(dī),使其适用于對大(dà)量資産進行(xíng)标簽。人(rén)員定位标簽有(yǒu)腕帶式和(hé)卡片式,卡片式上(shàng)可(kě)定制(zhì)功能按鍵,可(kě)用于求救呼叫或位置上(shàng)報功能。
3、定位體(tǐ)系軟件。讀寫器(qì)配備專門(mén)的RTLS CLAS系統軟件,每個(gè)讀寫器(qì)都需要具備該軟件許可(kě)證。即可(kě)通(tōng)過RTLS CLAS軟件在服務器(qì)上(shàng)進行(xíng)定位盤點操作(zuò)。如圖1,為(wèi)RTLS系統的工作(zuò)原理(lǐ)。CLAS配置和(hé)位置分析軟件對一體(tǐ)機讀到的标簽進行(xíng)三角定位和(hé)彙總,提供無源标簽UHF RFID标簽所标記資産的,x,y,z信息。如圖2,為(wèi)RTLS系統估算(suàn)标簽的位置圖,CLAS使用角度到達(AoA)技(jì)術(shù)對标簽進行(xíng)三角定位。
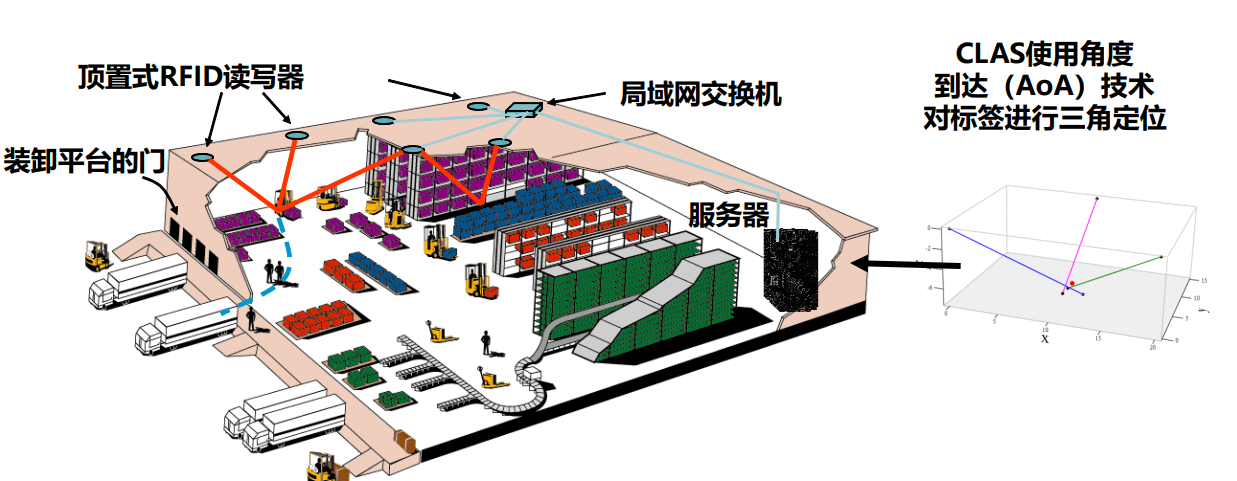
圖1 RTLS的工作(zuò)原理(lǐ)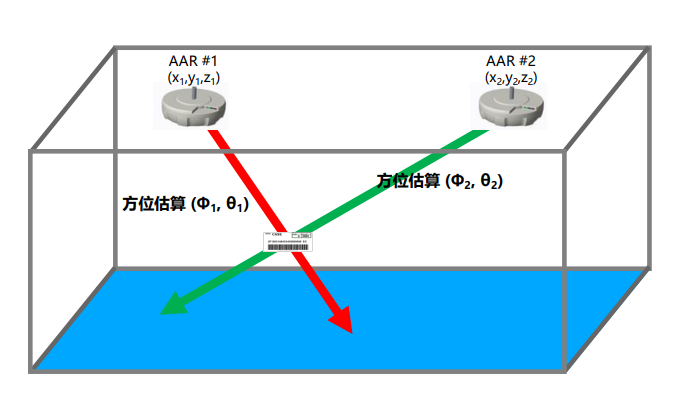
圖2 RTLS系統估算(suàn)标簽位置圖
AOA定位技(jì)術(shù)目前并非是多(duō)數(shù)讀取器(qì)定位系統的主流技(jì)術(shù),但(dàn)将來(lái)如果增加讀取器(qì)智慧型天線設備,并且提高(gāo)系統的角度解析度,而且,AOA可(kě)以在不增加讀取器(qì)設備的情況下與主動式标簽結合,則AOA有(yǒu)可(kě)能成為(wèi)主流的定位技(jì)術(shù)。
上(shàng)一篇:暫無